sgr ' s n シリーズ高トルク同軸惑星ギアボックス ...
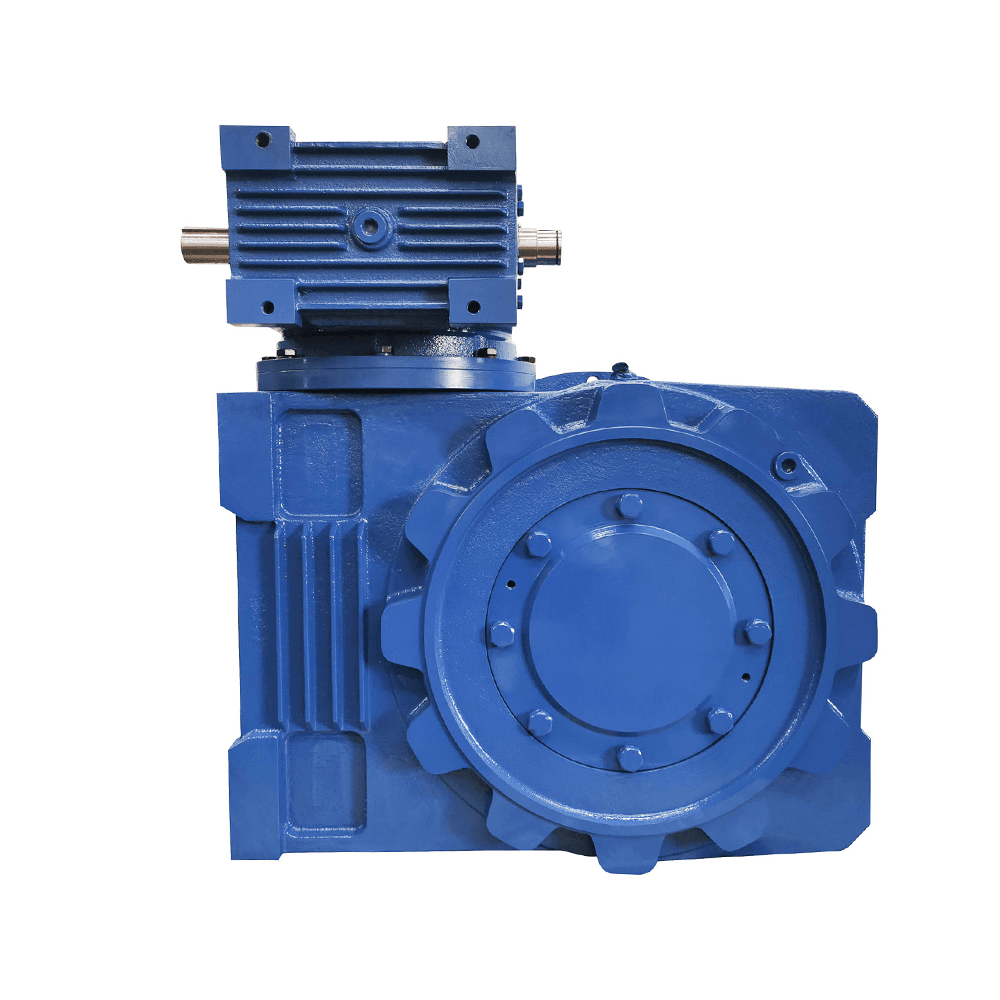
詳細を参照してください** 遊星ウォームギヤ **は高減速比(ウォームステージによる)と高トルク密度(プラネタリーステージによる)の融合を表します。オートメーションとロボティクスの場合、主な技術的課題はギアの設計自体だけではなく、さまざまな駆動モーターとのシームレスでコンパクトな標準化された統合です。高効率の実現 サーボモーターとウォームギヤヘッドの統合 標準化されたインターフェイスと最小限の組み立て体積を利用した、堅牢な **モジュール式遊星ウォーム ギア設計**が必要です。
モジュール式アーキテクチャにより、B2B サプライヤーは、注文ごとに新しいハウジングを設計することなく、さまざまなモーター仕様に合わせてギアボックスを迅速に構成できます。
製造と調達の観点から見ると、モジュール化により複雑さが大幅に軽減されます。サプライヤーは、コアギアユニットの在庫を維持し、事前加工されたアダプターフランジの在庫を少なくすることができるため、非モジュール式のカスタム加工ソリューションと比較してリードタイムを短縮できます。
| 設計アプローチ | 製造の複雑さ | **サーボ モーターとウォーム ギアヘッドの統合**における柔軟性 |
|---|---|---|
| カスタム/固定ハウジング | 高 (モーター サイズごとに新しいツールが必要)。 | 低 (1 つのモーター フレーム サイズにしっかりとロック)。 |
| モジュール式 遊星ウォームギア | 低 (標準化されたコアユニット)。 | 高 (アダプター フランジの迅速な交換により、数十のモーター タイプとの統合が可能)。 |
モーターアダプターは統合の要です。その設計は、機械的な互換性とドライブトレインの精度の両方を左右します。
同心性、つまりモーター シャフトとギアボックス入力シャフトの位置合わせは非常に重要です。ミスアライメントはベアリングの摩耗を促進し、騒音を発生させます。アダプター フランジの精密機械加工とセンタリング パイロット (位置決めスピゴット) の使用は、半径方向の振れを最小限に抑え、高速用途でのスムーズな動作に必要な高度なアライメントを実現するための交渉の余地のない戦略です。
オートメーション、特にロボット工学やマテリアルハンドリングでは、サイズと重量がパフォーマンス上の重要な制約となります。 **遊星ウォーム ギア** ハイブリッドは、本質的にここで利点を提供します。
効果的 ロボット用のコンパクトな遊星ウォームギアボックス 設計には、高い剛性を維持しながらハウジングの材料を最小限に抑えるために有限要素解析 (FEA) が必要です。ハウジングの形状は、放熱を最大化し、内部ベアリングをしっかりとサポートするように設計されており、ピーク荷重時のたわみを最小限に抑え、精密オートメーションに不可欠な低振動特性を確保します。
統合は、システム全体のパフォーマンスを低下させるのではなく、強化する必要があります。
ウォーム ステージは、滑り摩擦により本質的により多くの熱を発生します。効果的 サーボモーターとウォームギヤヘッドの統合 アダプタ フランジの境界面に熱伝導コンパウンドを使用し、ハウジングの表面積を最適化して温度上昇を管理し、ギア潤滑剤とモータ シールの両方の寿命を維持することで、これを考慮する必要があります。
Shanghai SGR Heavy Industry Machinery Co., Ltd. は、歯車伝動ソリューションに特化したハイテク企業で、低振動、低騒音のコンパクト、モジュール式、標準化された設計を優先しています。当社の研究開発チームは博士号と上級エンジニアで構成されており、遊星ギアボックスや平面二重包囲ウォームギア最適化設計システムなどの高度な製品の開発に関する専門知識を持っています。当社の精度へのこだわりは、国内で革新されたトロイダル ウォームおよびホブ測定器、電力および効率テスト システムなどの高度な機械によって裏付けられています。当社は **モジュラー遊星ウォーム ギア設計**に特化しており、当社のギアボックスが効率的な運転を促進することを保証します。 サーボモーターとウォームギヤヘッドの統合 現代の産業機器の狭いスペース制約を満たし、 自動化のための惑星ワームドライブの最適化 世界的に。
主な利点は、在庫の簡素化とリードタイムの短縮です。モジュラー設計により、1 つのコア **遊星ウォーム ギア** ユニットをさまざまなユニットで迅速に構成できます ギアボックス用の標準化されたモーターアダプターフランジ 、多数の固有のギアボックス モデルを在庫する必要性が軽減されます。
標準化されたフランジ (IEC や NEMA など) により機械的な互換性が確保され、メーカーはギアボックスの取り付け構造を再設計することなくモーターのブランドや仕様を切り替えることができ、柔軟な調達が容易になります。
ウォームステージは、垂直(直角)方向で大幅な減速を実現し、多段インライン遊星システムと比較してユニットの軸方向全長を大幅に短縮し、よりコンパクトな設計を実現します。
アダプター フランジは、モーター シャフトとギアボックス入力シャフト間の同心度 (位置合わせ) を制御します。振動やベアリングの摩耗を最小限に抑え、システムのバックラッシュを低く維持するには、正確な同心度が不可欠です。
この最適化は、統合システム全体にわたって高いねじれ剛性と超低バックラッシュ (例: 5 分弧未満) を目指し、精密モーション制御アプリケーションに不可欠な正確かつ即時のトルク応答を保証します。



中心距離:100〜710 mm 速度比:I≥10。設計モジュール化、仕様のシリアル化、生産の専門化。 出力トルク範囲:T2≤160,000N.M. リン...
詳細を参照してください
中心距離:100〜710 mm 速度比:I≥10。設計モジュール化、仕様のシリアル化、生産の専門化。 出力トルク範囲:T2≤160,000N.M. リン...
詳細を参照してください
さまざまな速度比を選択できます。標準の油圧モーター界面、出力シャフトの歯が統合されています。 箱材料は延性鋳鉄で、ワーム材料は20crmnti炭水化物で、歯の表面の硬度はHRC58〜62に...
詳細を参照してください
ギアボックスは、標準化と優れたシーリングで設計されており、マルチアングルインストールに適応できます。この設計は、一般的な機器のスペースレイアウトを最大化します。ワーム材料は20crmntiであり...
詳細を参照してください
惑星ギアトランスミッションの高効率と、ワームギアリデューサーの大きな速度比のセルフロック機能を組み合わせることで、この設計は特別な産業用具に適しています。それは、ロードする必要がある機器の重量ま...
詳細を参照してくださいSGRは、1996年以来、ISO 9001認定のDNV認定業界ギアボックスメーカーです。世界中のブランドにさまざまなギアリデューサーを供給しています。
